Robot Penjinak Bom Berbasis Mikrokontroler

Tujuan Robot Penjinak Bom
Robot yang sering digunakan untuk pelaksanaan penjinak
bom adalah jenis dari security robot. Security robot yang paling sering
digunakan untuk menjinakkan bom adalah mobile robot yang dilengkapi lengan
manipulator dengan gripper diujungnya yang berfungsi untuk memindahkan bom tersebut
ke tempat yang aman untuk dijinakkan. Pada prinsipnya robot penjinak bom ini
sama dengan security robot yaitu gabungan antara mobile robot dan manipulator
robot. Mobile robot merupakan base dari sistem ini Sedangkan manipulator robot
diletakkan dibagian atas dari base, yang berfungsi mirip lengan manusia.
Keluaran yang diharapkan dari simulasi yaitu Robot
penjinak bom dapat menjalankan fungsinya sesuai dengan program yang telah di
input kedalam mikrokontroler.
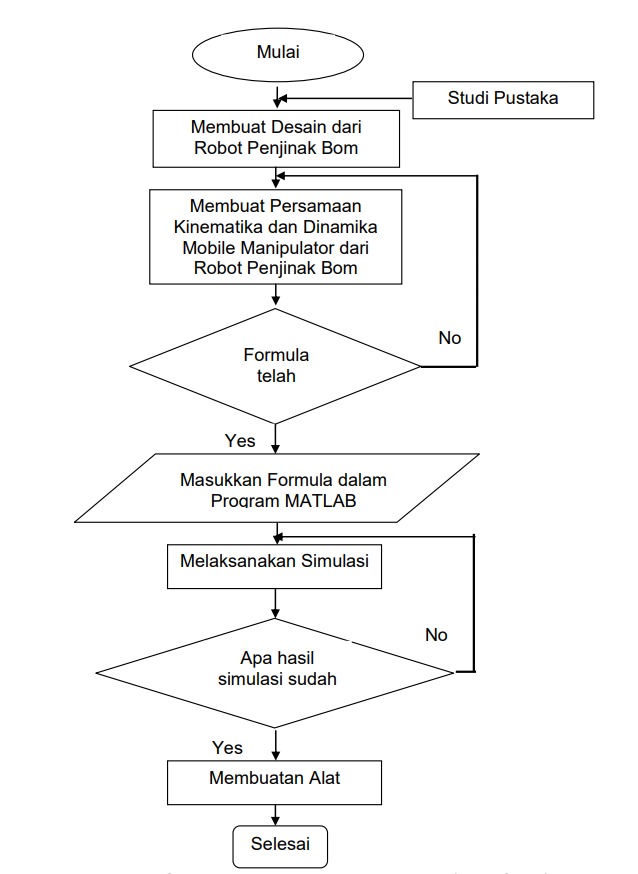
Studi kasus yang diselesaikan
Proses pembuatan robot penjinak bom
ini di awali dengan menggambar desain pada program auto cad, selanjutnya
simulasi pada program matlab. Selanjutnya robot dibuat sesuai dengan desain
yang dibuat. Simulasi pada proram matlab berjalan dengan baik sesuai dengan
hasil formula perhitungan kinematika manipulator dan mobile manipulator yang
telah di hitung.
1. Fungsi dari alat yang digunakan
1.
Mikrokontroler
ATmega 8535
Mikrokontroler ATmega 8535 memiliki fitur yang cukup lengkap.
Mikrokontroler ATmega 8535 telah dilengkapi dengan ADC internal, EEPROM
internal, Timer/Counter, PWM, analog comparator. Sehingga dengan fasilitas yang
lengkap ini memungkinkan kita belajar mikrokontroler keluarga AVR dengan lebih mudah
dan efisien, serta dapat mengembangkan kreativitas penggunaan mikrokontroler
ATmega 8535. PWM (Pulse Width Modulation) dapat digunakan untuk mengatur
kecepatan motor, yaitu dengan cara mengatur lebar pulsa (waktu ON) dari
tegangan sumbernya (tegangan DC).
2.
Sensor Garis / LDR-LED
Sensor garis adalah jenis sensor yang berfungsi
mendeteksi warna garis hitam atau putih. Sensor ini penting karena sensor
menentukan arah dan gerakan robot. Sensor pendeteksi garis yang digunakan dalam
robot adalah mendasarkan pada prinsip pemantulan cahaya dari LED dan photodioda
sebagai penerima cahaya.
Sensor garis berfungsi untuk mendeteksi warna dari
permukaan yang berada di bawah robot penjejak garis dengan maksud agar sensor garis
ini dapat mengasilkan logika posisi dari robot penjejak garis terhadap garis
tepat berada di bawah robot. Logika posisi yang dihasilkan oleh sensor garis
ini kemudian akan dijadikan input ke mikrokontroler pada robot.
3.
Manipulator
Manipulator memiliki dua bagian, yaitu bagian dasar dan
bagian tambahan. Bagian dasar manipulator bisa kaku terpasang pada lantai area
kerja ataupun terpasang pada rel. Rel berfungsi sebagai path atau alur sehinga memungkinkan
robot untuk bergerak dari satu lokasi ke lokasi lainnya dalam satu area kerja. Bagian
tambahan merupakan perluasan dari bagian dasar, bisa disebut juga lengan/arm.
Bagian ujungnya terpasang efektor yang berfungsi untuk mengambil/mencekam
material. Manipuator digerakkan oleh aktuator atau disebut sistem drive.
Aktuator atau sistem drive menyebabkan gerakan yang bervariasi dari
manipulator. Aktuator bisa menggunakan elektrik, hidrolik ataupun pneumatik.
4. Power Supply
Power supply adalah sebuah unit yang menyediakan tenaga pada kontroler dan manipulator sehingga dapat bekerja. Power supply dalam suatu sistem robot dibagi menjadi dua bagian, yaitu bagian untuk kontroler dan bagian untuk manipulator. Bagian kontroler menggunakan elektrik sedangkan bagian manipulator bisa menggunakan elektrik, pneumatik, hidrolik ataupun ketiganya.
Blog Diagram
Wiring Rancangan Alat




Komentar
Posting Komentar